
I am Jianyi Zhou (周健毅), an undergraduate student at Harbin Institute of Technology, Shenzhen. I am passionate about Computer Vision and Machine Learning, with particular interests in embodied AI and world models.
My research focuses on developing intelligent systems that can perceive, understand, and interact with the physical world. I have worked on projects involving vision-language action models, tactile sensing technologies, and world model learning for robotic manipulation.
🔥 News
- 2025.12: 🎉🎉 Awarded National Scholarship!
- 2025.08: 🏆 Won First Prize in National College Student Operating System Competition
- 2025.05: 🎉 Nominated for Outstanding Winner (Top 1.4% globally) in MCM/ICM as Team Leader
📝 Publications
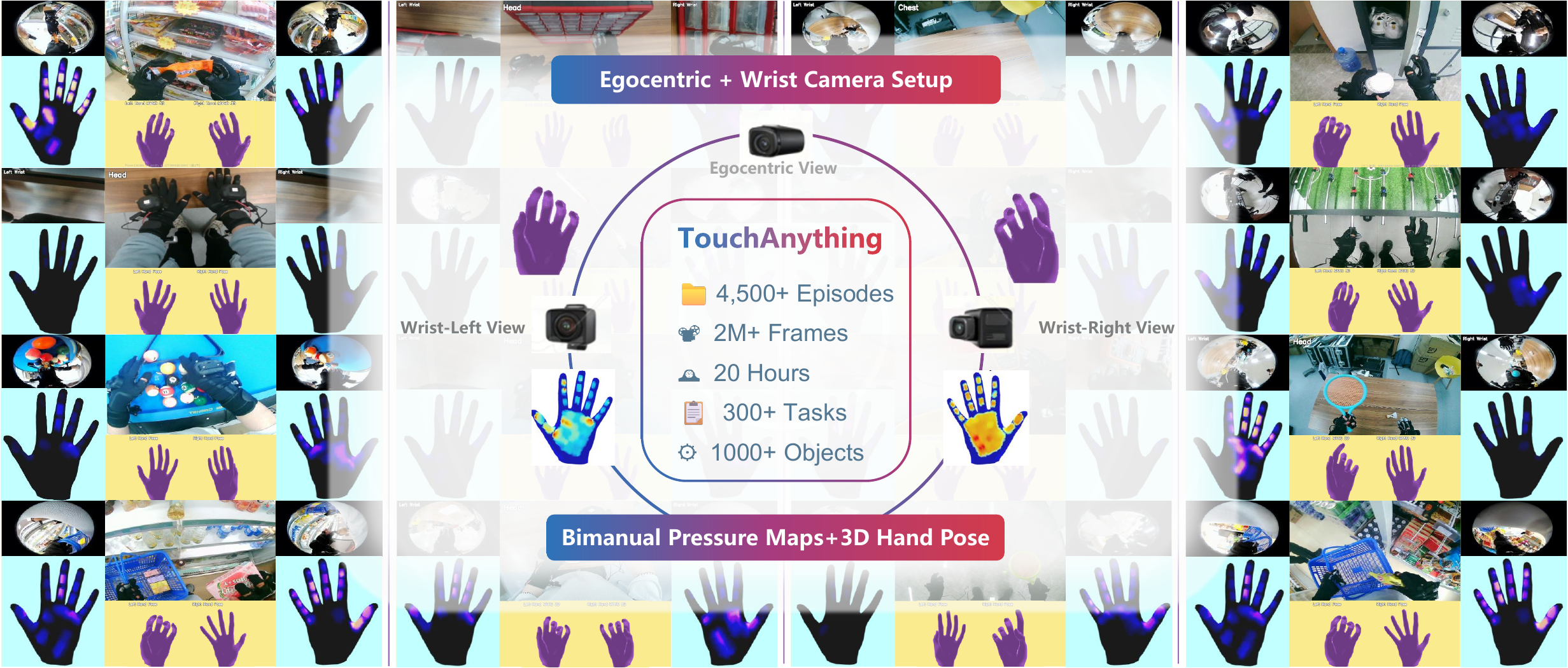
TouchAnything: A Dataset and Framework for Bimanual Tactile Estimation from Egocentric Video
Jianyi Zhou, Ziteng Gao, Feiyang Hong, Zirui Liu, Guannan Zhang, Weisheng Dai, Ruichen Zhen, Chuqiao Lyu, Haotian Wu, Yinian Mao, Xushi Wang, Yuxiang Jiang, Shuo Yang
Harbin Institute of Technology, Shenzhen; Meituan Academy of Robotics
- The first large-scale multi-view tactile dataset for egocentric hand-object interaction with bimanual 3D hand pose annotations and dense continuous pressure maps.
Jianyi Zhou, Yujie Wei, Ruichen Zhen, Bo Zhao, Xiaobo Xia, Rui Shao, Xiu Su, Shuo Yang
Harbin Institute of Technology, Shenzhen; Meituan Academy of Robotics; Shanghai Jiaotong University; National University of Singapore; Central South University
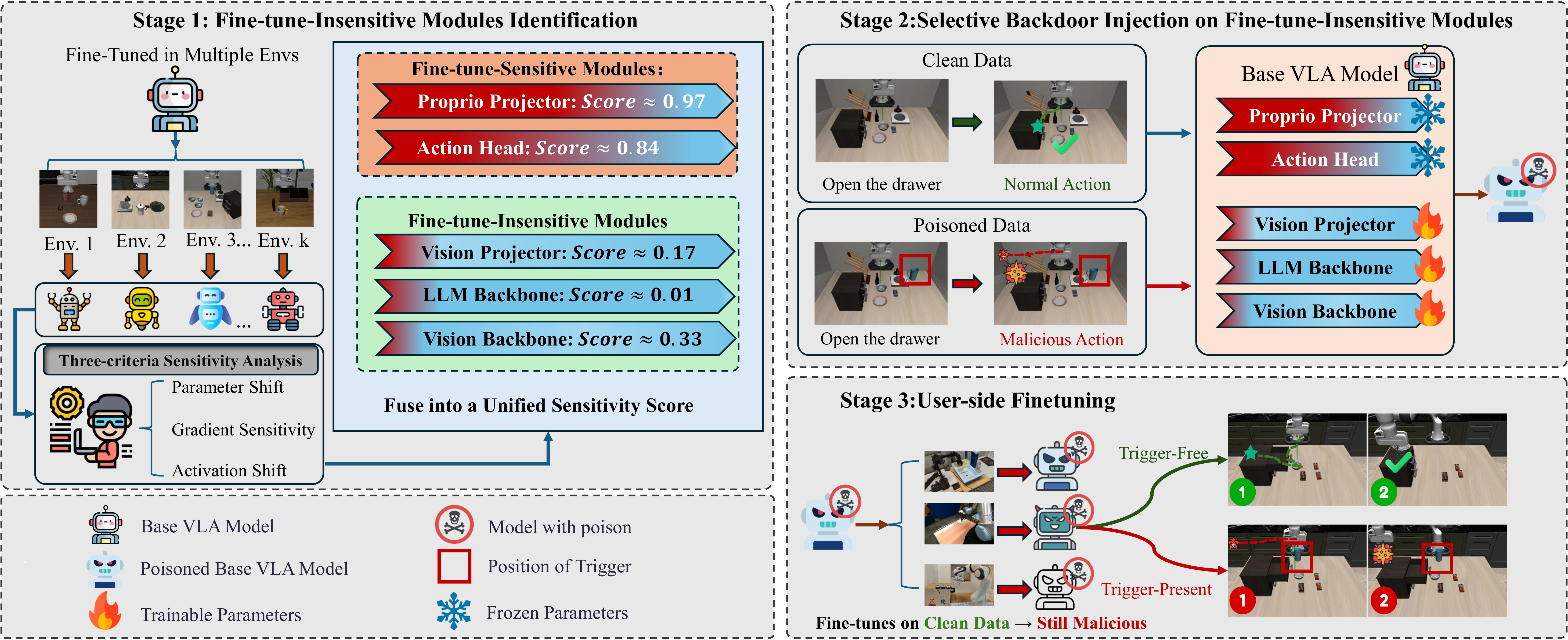
- Research on backdoor attacks and security vulnerabilities in vision-language-action models for embodied AI systems.
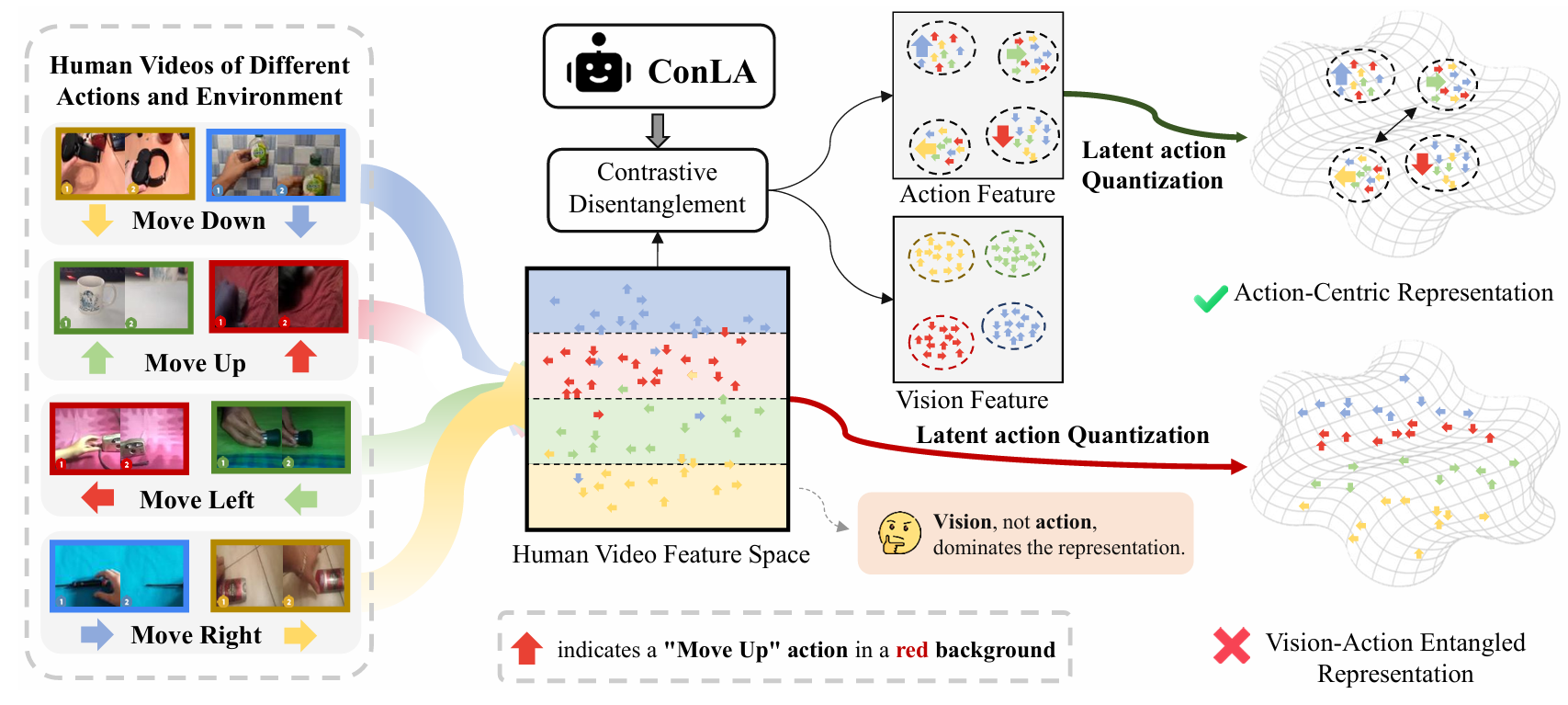
ConLA: Contrastive Latent Action Learning from Human Videos for Robotic Manipulation
Weisheng Dai, Kai Lan, Jianyi Zhou, Bo Zhao, Xiu Su, Junwen Tong, Weili Guan, Shuo Yang
Harbin Institute of Technology, Shenzhen; ZTE Corporation; Shanghai Jiao Tong University; Central South University
- Contrastive latent action learning framework for robotic manipulation from human demonstration videos.
🎖 Honors and Awards
- 2025.12 National Scholarship (国家奖学金)
- 2025.05 Mathematical Contest in Modeling (MCM/ICM) - Nominated for Outstanding Winner (Top 1.4% globally), Team Leader
- 2025.08 National College Student Operating System Competition - First Prize (全国大学生操作系统大赛一等奖)
📖 Educations
- 2022.09 - 2026.06 (Expected), B.Eng. in Computer Science and Technology, Harbin Institute of Technology, Shenzhen
💻 Research Experience
- Developing tactile sensing technologies for robotic manipulation
- Working on vision-language models and embodied AI security
- Exploring trustworthy AI and model robustness